Optimal MmWave Sensor Selection for Bearing-Only Localization in Smart Environments
Abstract
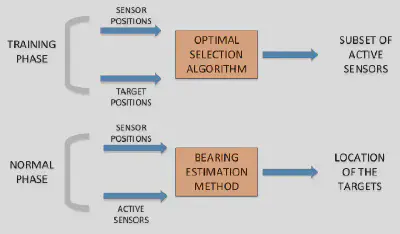
Nowdays, millimeter wave (mmW ave) direction sensors are being used increasingly as general-purpose radars, since they can provide high-level of accuracy for a variety of situations at low-cost. Via mutliple mmW ave sensors, bearing estimation can be derived to track the position of a target, while in smart environments several sensors can be deployed. In this work, we provide an optimal sensor selection technique, for choosing which sensors to activate for bearing estimation and which not. The proposed approach is decomposed into training phase, where sensor selection is performed, and operational phase, where bearing estimation is obtained. Via simulation results we evaluate the proposed approach compared with the conventional methodology of utilizing all available data streams. I. I N T RO D U C T I O N Collaboration between humans and robots plays a sig- nificant role in smart industries since it helps to achieve improved production and efficiency . However, as the separa- tion between robot and human workstations is removed, this evolution means breaking with established safety procedures [1]. Sensor nodes are used in industrial operations to collect system measurements.
Key Contributions
- Development of an optimal sensor selection technique for mmWave bearing-only localization.
- Addressing the challenge of low-cost deployment in smart environments through efficient sensor usage.
- Emphasizing privacy-preserving localization methods compared to traditional RF-based approaches.
- Providing performance analysis through simulations under various scenarios.