Compressed Sensing for Efficient Encoding of Dense 3D Meshes Using Model-Based Bayesian Learning
Abstract
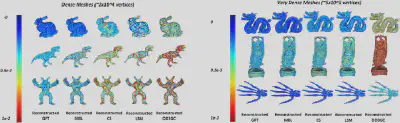
With the growing demand for easy and reliable generation of 3D models representing real-world or synthetic objects, new schemes for acquisition, storage, and transmission of 3D meshes are required. In principle, 3D meshes consist of vertex positions and vertex connectivity. Vertex position encoders are much more resource demanding than connectivity encoders, stressing the need for novel geometry compression schemes. The design of an accurate and efficient geometry compression system can be achieved by increasing the compression ratio without affecting the visual quality of the object and minimizing the computational complexity. In this paper, we present novel compression/reconstruction schemes that enable aggressive compression ratios, without significantly reducing the visual quality. The encoding is performed by simply executing additions/subtractions. The benefits of the proposed method become more apparent as the density of the meshes increases, while it provides a flexible framework to trade efficiency for reconstruction quality.
Key Contributions
- Propose a novel compressed sensing framework for 3D mesh geometry compression using Bayesian learning, enabling aggressive compression ratios without compromising visual quality.
- Introduce a multivariate Gaussian model for the most significant graph Fourier transform coefficients of each submesh, derived via expectation-maximization.
- Leverage local smoothness of partitioned surfaces to enhance performance in highly underdetermined problems, reducing encoding complexity while maintaining reconstruction accuracy.
Results & Insights